We can show you the world
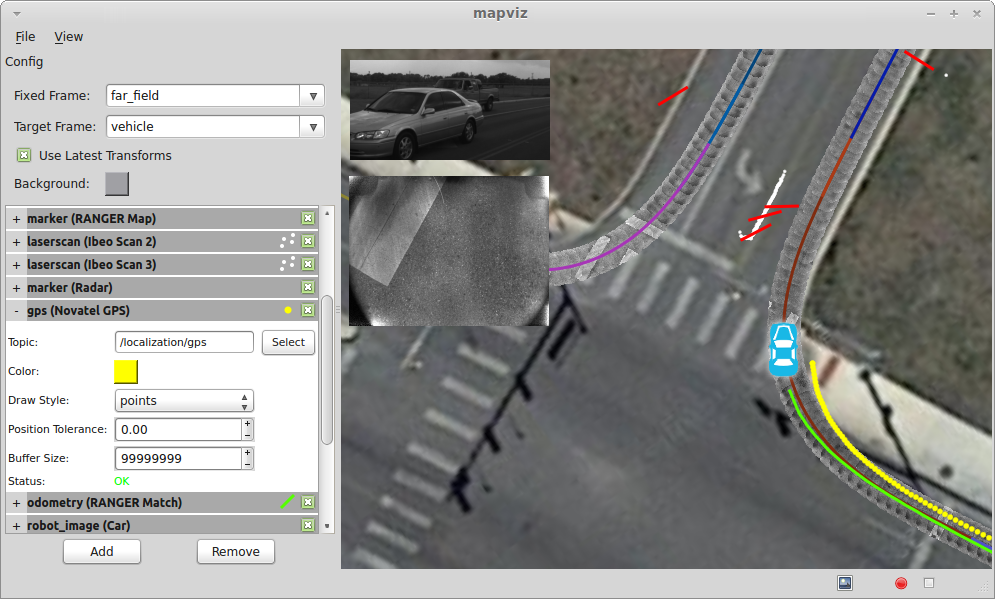
Mapviz is a highly customizable ROS-based visualization tool focused on large-scale 2D data, with a plugin system for extreme extensibility.
Get started now View it on GitHub
Getting Started
The easiest way to install Mapviz is using apt-get:
$ sudo apt-get install ros-$ROS_DISTRO-mapviz \
ros-$ROS_DISTRO-mapviz-plugins \
ros-$ROS_DISTRO-tile-map \
ros-$ROS_DISTRO-multires-image
Building From Source
These directions assume you have already set up a colcon workspace. If not, see this tutorial on the ROS 2 Wiki to set one up.
- Check out the source
Using
vcstoolIf you’re usingvcstool, add this repository to yourvcstoolworkspace:$ cat mapviz.repos # example repos file to import repositories: vcstool: type: git url: https://github.com/swri-robotics/mapviz.git version: ros2-devel $ vcs import < mapviz.reposUsing
gitIf you’re not using vcstool, you can check out the repository directly withgit:$ git clone https://github.com/swri-robotics/mapviz.git
Install dependencies
Install all of the dependencies using
rosdepby running the following command from the root of yourcolconworkspace:$ rosdep install --from-paths src --ignore-srcBuild the workspace:
$ colcon build